ANZEIGE
4. Mobilität und Geländeadaption
ANZEIGE
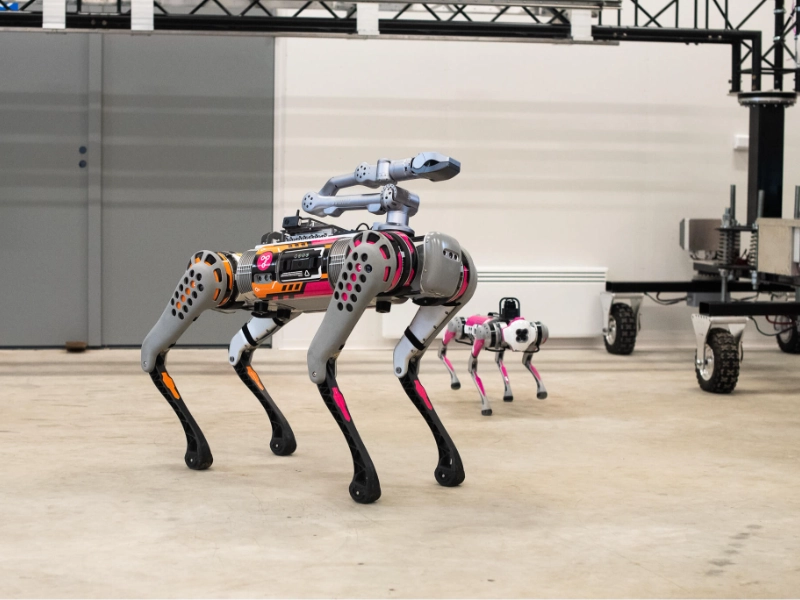
In seiner vierbeinigen Konfiguration zeigt der Roboter eine bemerkenswerte Mobilität über verschiedene Geländearten hinweg. Dynamische Balancesysteme und fortschrittliche Beinaktuatoren ermöglichen die Navigation über urbane Hindernisse, Treppen und unebenes Gelände. Das Gangsteuerungssystem des Roboters passt sich kontinuierlich den Bodenverhältnissen an und bewahrt die Stabilität bei Geschwindigkeiten von bis zu 35 Kilometern pro Stunde. Fortschrittliche Stoßdämpfungssysteme schützen empfindliche interne Komponenten bei Hochgeschwindigkeitsmanövern und der Überquerung schwierigen Terrains. Der Roboter kann zudem effizient unter extremen Wetterbedingungen arbeiten, von Wüstenhitze bis hin zu arktischer Kälte.